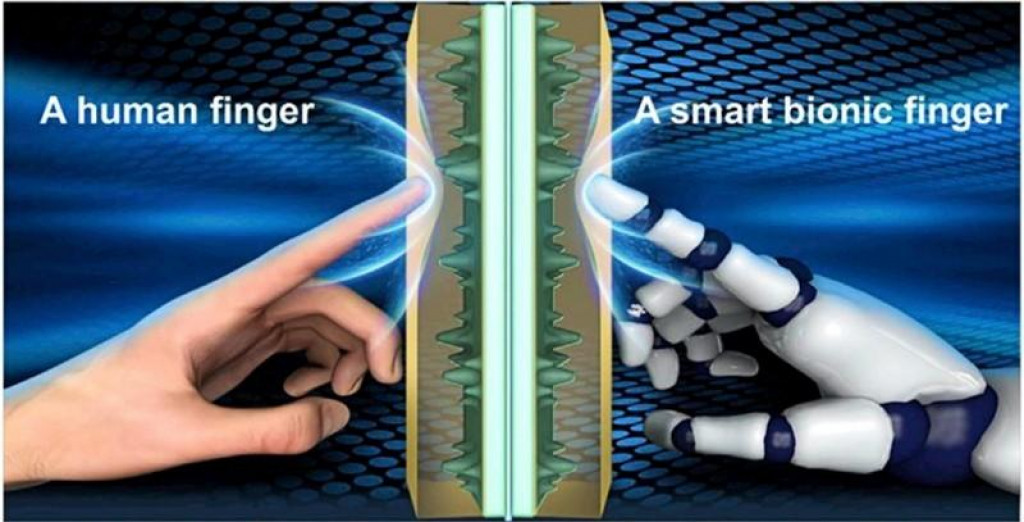





Ljudski vrh prsta je izuzetno osјetljjiv instrument za opažanje objekata u našem okruženju putem čula dodira. Tim kineskih naučnika oponašao je osnovni perceptualni mehanizam za stvaranje bioničkog prsta sa integrisanim sistemom taktilne povratne sprege koji je sposoban da pritiska po složenim objektima kako bi mapirao detalje ispod površinskog sloja.
"Inspirisali su nas ljudski prsti, koji imaju najosјetljiviju taktilnu percepciju za koju znamo", rekao je koautor rada Jianyi Luo sa Univerziteta Wuyi. "Na primјer, kada dodirnemo sopstvena tiјela prstima, možemo osјetiti ne samo teksturu naše kože, već i obrise kosti ispod nje. Ova taktilna tehnologija otvara neoptički put za nedestruktivno ispitivanje ljudskog tiјela i fleksibilne elektronike."
Prema autorima, ranije razvijeni vјeštački taktilni senzori mogli su samo da prepoznaju i razlikuju spoljašnje oblike, površinske teksture i tvrdoću. Ali oni nisu u stanju da osјete ispodpovršinske informacije o tim materijalima. Ovo obično zahtiјeva optičke tehnologije, kao što su CT skeniranje, PET skeniranje, ultrazvučna tomografija (koja skenira spoljašnjost materijala da bi se rekonstruisala slika njegove unutrašnje strukture), ili MRI, na primјer. Ali sve ovo ima i nedostatke. Slično, optička profilometrija se često koristi za mјerenje profila i završne obrade površine, ali radi samo na providnim materijalima.
Kada dodirnemo nešto prstima, koža doživljava mehaničku deformaciju kao što je kompresija ili istezanje, što pokreće mehanoreceptore da šalju električne impulse. Ovi impulsi putuju kroz centralni nervni sistem do somatosenzornog korteksa mozga. Mozak integriše te električne impulse da bi identifikovao karakteristike objekta koji dodirujemo. Ta taktilna povratna informacija nam omogućava da prepoznamo oblik materijala, teksturu površine i krutost ili mekoću.
Pametni bionički prst imitira ovaj sistem povratnih informacija. Metalni cilindar postavljen na vrh prsta služi kao kontaktni vrh, dok snopovi od ugljeničnih vlakana služe kao taktilni mehanoreceptori (senzorna jedinica). Oni su povezani sa modulom za obradu signala. Prst "skenira" površinu ciljanog objekta periodičnim pritiskom, slično bockanju ili probadanju. Ovo kompresuje ugljenična vlakna, a to koliko se materijal kompresuje prenosi informacije o njegovoj relativnoj krutosti ili mekoći. Ta informacija, zajedno sa mјestom na površini koja je snimljena, zatim se šalje kompjuteru, koji podatke prevodi u 3D mapu. Autori su svoj bionički prst testirali koristeći različite složene objekte. Na primјer, testirali su sposobnost prsta da otkrije i mapira kruto slovo "A" odmah ispod mekog silikonskog sloja, zajedno sa drugim apstraktnim oblicima. Prsti su čak mogli da uoče razliku između krutih i mekih unutrašnjih materijala, i mekog spoljašnjeg silikonskog premaza.
Takođe su napravili 3D štampani fizički model za ljudsko tkivo od tri sloja tvrdog polimera (za "skelet") i mekog silikonskog spoljašnjeg sloja (za "mišiće"). Bionički prst je skenirao i uspјešno reprodukovao 3D profil strukture tkiva modela, uključujući lokaciju "krvnog suda" koji se nalazi ispod "mišićnog" sloja.
Konačno, autori su testirali bionički prst na neispravnom elektronskom uređaju, uspјešno kreirajući mapu unutrašnjih komponenti. Prst je mogao tačno da odredi gdјe je strujno kolo bilo isključeno i da identifikuje rupu koja je bila nepropisno izbušena bez probijanja okolnog spoljašnjeg sloja. "Dalje, želimo da razvijemo kapacitet bioničkog prsta za omnismernu detekciju sa različitim površinskim materijalima", rekao je Luo.
Izvor: Arstechnica